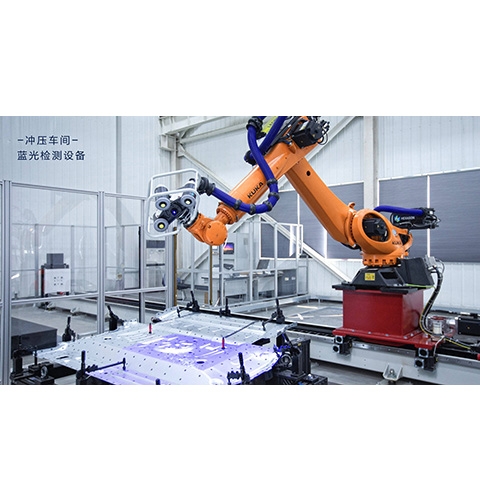
机器人标定

机器人误差产生原因:
利用现有CAD数据以及机器人理论结构参数所建立的运动学模型与实际情况存在着误差, 再加上系统集成方面的不确定性因素、设备损坏、配件产品老化、环境温度影响等等,往往会导致正常机器人作业时,重复精度高而精度低的现象。因而必须对机器人性能进行评估、校准。对误差进行测量,分析,不断修正所建模型。
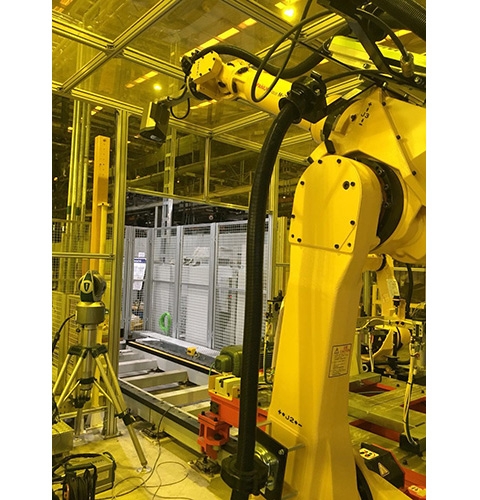
经验表明:没有校准的机器人底座通常存在15――30mm的误差;TCP中心点存在5――10mm的误差;机器人整个系统存在5――10mm的误差。加入校准环节的机器人精度将(能达到±0.25――1mm)大大提高,且算法稳定性良好。校准使得机器人适用于更复杂、多变、精度要求高的环境。
念承科技的激光跟踪仪系统配套校准软件可以对机器人运动中六维位姿精度的测量和计算,还包括了工业机器人DH模型参数校准模块。
静态特性测试:
位姿准确度和位姿重复性、多方向位姿准确度、距离准确度和距离重复性、位姿特性漂移、互换性 、静态柔顺性。
动态特性测试:
位置稳定时间、变动位置超调量、轨迹准确度和轨迹重复性、重复定向轨迹准确度、拐角偏差、轨迹速度特性、最小定位时间、摆动偏差。
系统组成:
硬件:激光跟踪仪、靶球及负载安装夹具。
软件:6自由度空间测量软件、性能测量和分析处理软件、机器人结构参数校准。
软件(通用六轴、scara、协作、七轴机人)。